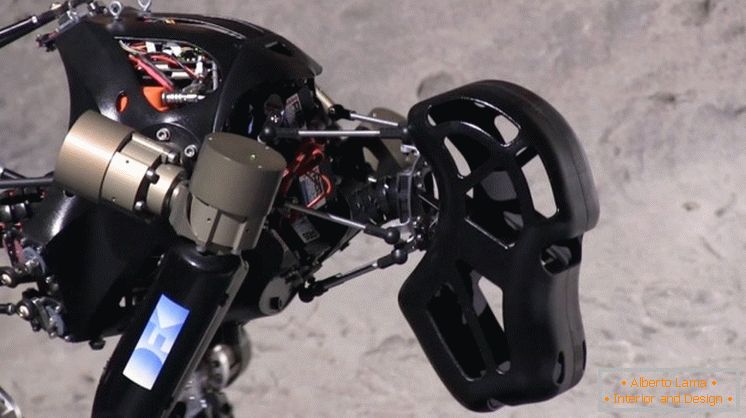
Le Centre allemand de recherche sur l'intelligence artificielle (DFKI) et l'Université de Brême travaillent sur le robot simien iStruct Demonstrator, qui est classé comme "robot spatial". Maintenant, les singes mécaniques passent des tests de marche et d'équilibre dans des conditions proches du relief de la lune.

L'étude des surfaces lunaires dangereuses nécessite l'utilisation de diverses formes de mouvement, et les chercheurs de DFKI étudient leurs capacités (y compris une combinaison de jambes, de roues et de chenilles). Les robots ressemblant à des singes présentent certains avantages par rapport au roulement à quatre roues. Le support à quatre points vous permet de créer une position plus stable lorsque vous franchissez des obstacles ou des terrains accidentés. Le robot peut s'équilibrer sur ses pattes arrière pour libérer les membres antérieurs afin d'effectuer toute action.

Avec de nouveaux intérêts internationaux dans la mission lunaire, il est possible que iStruct (ou l'un de ses descendants) puisse visiter la lune. La colonisation de la Lune par les robots commencera par un développement qui pourra se développer et réagir raisonnablement dans toutes les situations actuelles. Le but du projet est de construire une "intelligence artificielle avancée" et un système robotique capable d'apprendre et de naviguer.
Le robot a une colonne vertébrale articulée qui relie le tronc et le bassin, lui conférant une plus grande flexibilité, ainsi qu'un capteur de charge pour le pied et la cheville qui réagissent au contact du sol.
Les autres caractéristiques comprennent:
- 43 moteurs indépendants
- Six capteurs FSR supplémentaires sur des pièces ouvertes permettent de détecter des obstacles;
- Capteur de couple à 6 axes;
- Accéléromètre numérique à 3 axes, pour percevoir l'orientation du pied dans l'espace;
- Deux capteurs de température pour compenser les changements de température dans l'électronique;
- Capteur magnétique numérique pour le contrôle angulaire de chaque axe mobile de l'articulation du pied et de la cheville;
La plupart des robots contiennent déjà un grand nombre de ces capteurs, mais la colonne articulée iStruct (qui peut fonctionner comme un capteur de couple à 6 axes) est une sorte de rareté pour les robots de locomotion qui aide à se déplacer à quatre pattes. Des capteurs dans les articulations du pied et de la cheville lui permettront de garder son équilibre sur une surface inclinée.
En 2008 et 2009, un ingénieur diplômé, Daniel Kuhn, a travaillé sur un robot similaire. Un petit singe capable de marcher à quatre pattes. Après ce projet, il a commencé à travailler sur iStruct, qui comporte plusieurs mises à jour importantes. C'est un poids beaucoup plus grand, 18 kg (40 livres) et des dimensions de 66 x 43 x 75 cm (26 x 17 x 29 pouces), et contient également 26 degrés de liberté, et alimenté par divers moteurs électriques. Le projet devrait être achevé en août de cette année.
Vous pouvez voir comment il utilise ses pieds et ses chevilles intellectuels en marchant et en maintenant l'équilibre dans la vidéo ci-dessous. C'est un petit pas pour un robot singe, mais potentiellement un pas de géant pour toute la robotique de conception similaire.
Marcher
Équilibrage
Galerie de photos Total | 14 photos